At Consolidated Nuclear Security, I worked with the Oak Ridge Enhanced Technology and Training Center (ORETTC) to create a simulation for use with partner countries to exercise planning, analysis and preparation for the removal and transport of radioactive material between hospitals and other storage locations.
I was in charge of the full creation process of this tool. This involved gathering information on what stakeholders wanted from the tool, which included being able to upload a LiDAR scan of any interior, being able to emulate moving through the whole uploaded interior, and several tools for taking measurements within the environment. They also wanted the tool to include a route-planning aspect which would allow them to view the roadways they would need to take to their destination.
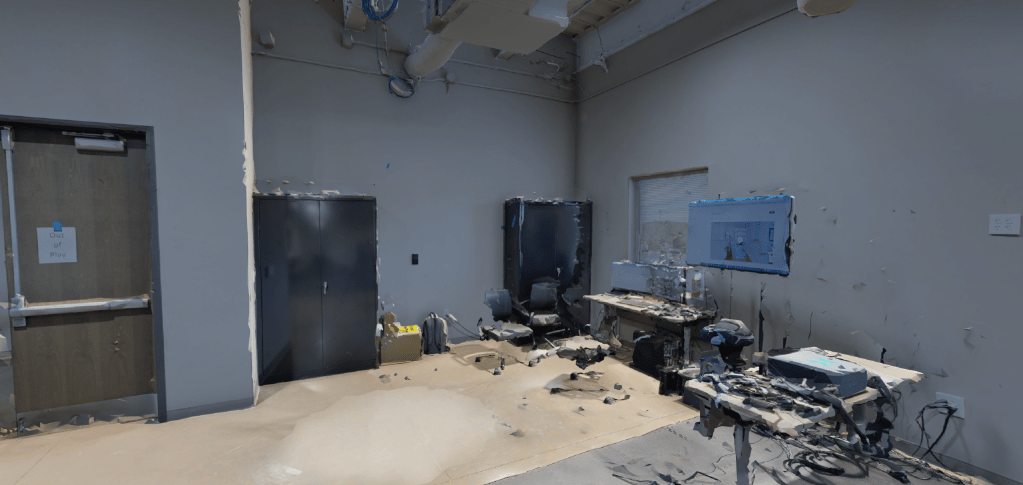
For the project, I combined LiDAR scans of building interiors with satellite imaging of street routes within the Unity game engine to create a multi-purpose simulation allowing for full mission planning from extraction to destination. In addition to this, I built a Python script that is integrated with the project, which automates the creation of a solid 3D model from a LiDAR scan’s point cloud.
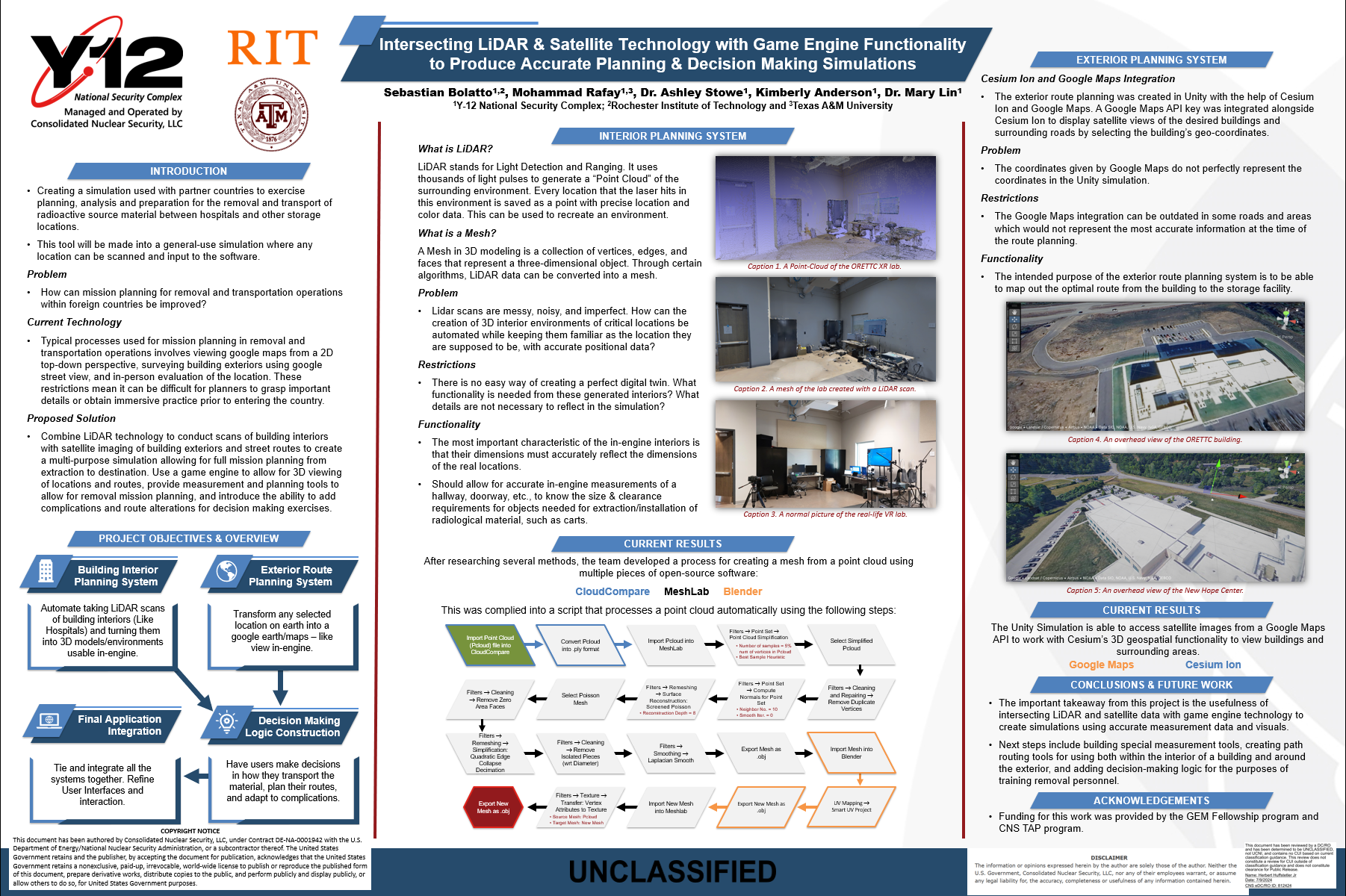
Below is an unclassified poster presentation I created, describing the project’s challenges and entire process: